Vorwort:
Wir alle sind primär VFR Flieger und kennen die Spielregeln zur korrenten Durchführung eines Fluges unter Sichtflugbedingungen. Daran halten wir uns! Ich persönlich würde mein Leben einem z.B. GY91 Chip niemals anvertrauen!
Deshalb kann die hier vorgestellte Lösung nur eine zusätzliche Sicherheit, aber niemals eine Garantie dafür sein! Das sollte jeder VFRnav Pilot zwingend akzeptieren!
Seit der Version 4.15 wurde ein großer Wunsch vieler Piloten die einen Stratux besitzen und mit VFRnav fliegen wieder mustergültig umgesetzt. Die Integration eines künstlichen Horizonts!
Vorraussetzung für die Funktionalität hierzu ist allerdings eine entsprechende Hardwareausstattung des Stratux-Systems! Im Stratux muss zwingend ein kompartibler Chipsatz verbaut und konfiguriert sein. Der Klassiker hierzu ist z.B. der GY91 mit Drei-Achsen-Gyroskop, Triaxial-Beschleunigungsmesser, Triaxial-Magnetfeld + Druck. Aber auch weitere Sensoren funktionieren.
→ …wenn nicht, sowas läßt sich immer nachrüsten ![]()
ToDo vor dem Start:
Wie bei jedem klassischen Horizont, so muss auch hier der künstl. Horizont zunächst einmal “eingestellt” werden. Das heist wir müssen den Sensor zunächst kalibrieren in Bezug auf Horizontallage (Fluglage), Flugrichtung (vorwärts), Nullstellung.
Bei fest im Flieger eingebauten Systemen ist dieser Vorgang eigentlich nur einmal nötig und ab und an ggf. um Drifts auszugleichen. Bei portablen Stratux-Geräten ist dieser Vorgang zwingend nach jeder Lageveränderung notwendig. Deshalb muss ein portabler Stratux in seiner Lage fest fixiert werden. (z.B. mit Klettband etc.)
Die Funktion “künstlicher Horizont” wird aktuell automatisch erkannt und zugeschalten.
Kalibrierung:
Wir navigieren zu dem Menüpunkt :
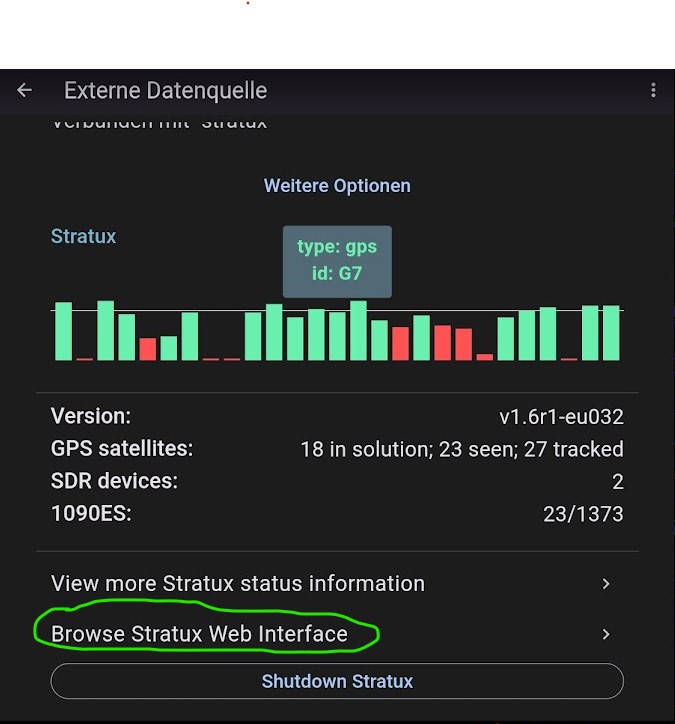
Einstellungen → Externe Datenquelle → Browse Stratux Web Interface
Nach dem Anklicken wird auf Basis des jeweils aktiven Browsers zum Stratux Interface umgeschalten. Wir befinden uns jetzt direkt auf der Konfigurationsseite des Stratux.
Hinweis: die default IP Adresse eines Stratux ist: 192.168.10.1 Sollte hier eine andere IP Adresse für den Stratux gewählt sein, so erreicht man das Webinterface durch Eingabe dieser IP Adresse in einem Browser ebenso.
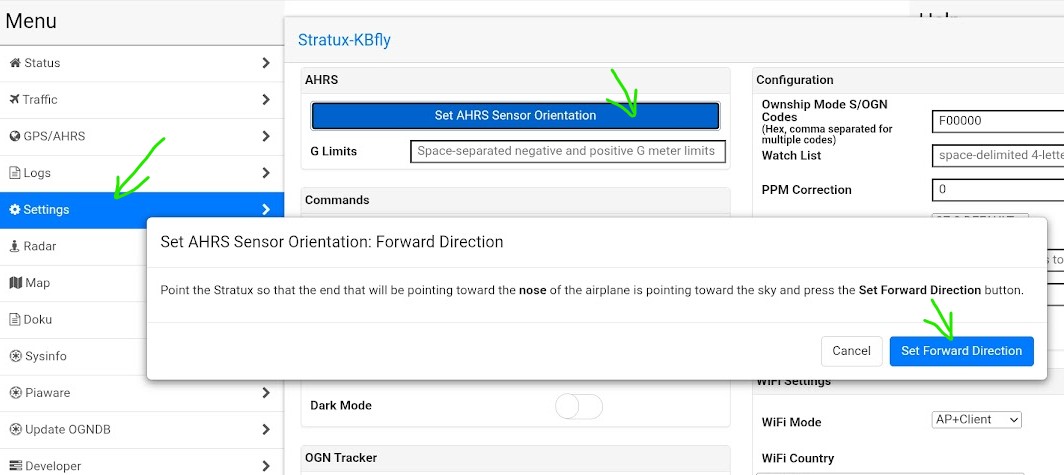
Wir navigieren jetzt zu dem Menüpunkt Settings → Aktivieren durch anklicken den -Button Set AHRS Sensor Orientation- und bestätigen in dem Fenster, daß die Einbaulage in Flugrichtung vorwärts korrekt ist.
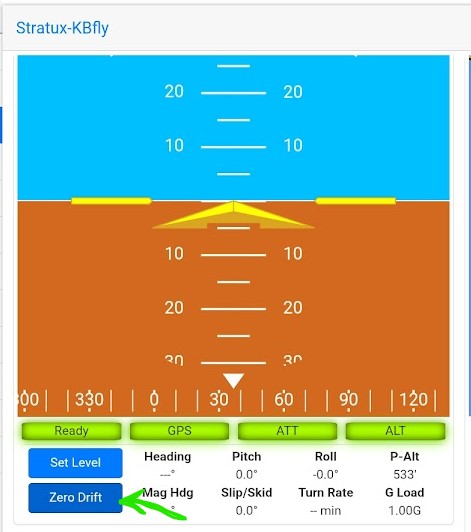
Als nächstes gehen wir zum Menüpunkt GPS/AHRS:
Hier Hier aktivieren wir den Button -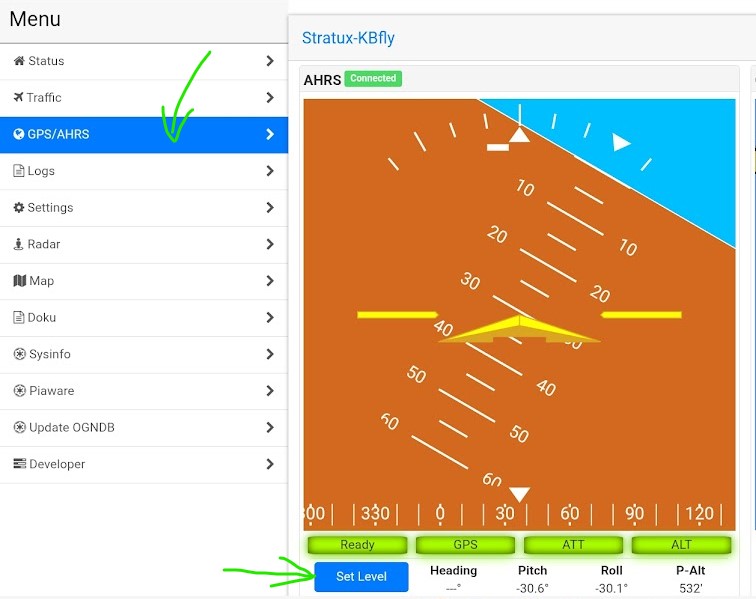
Set Level- …je nach Chipsatz kann die Kalibrierung einige Sekunden dauern! Der Stratux oder das Flugzeug darf während der Kalibrierung auf keinen Fall bewegt werden!!!
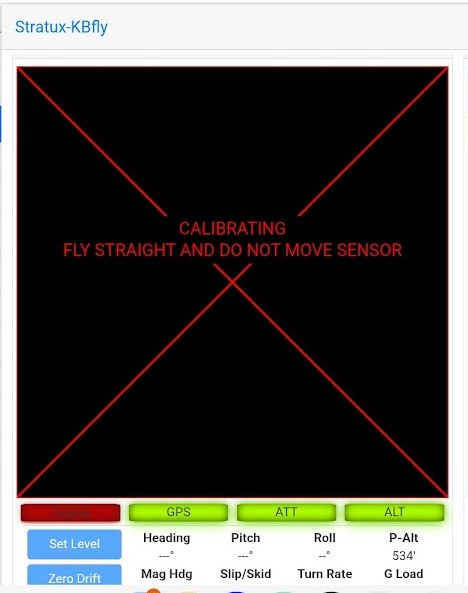
Den gleichen Vorgang machen wir nun noch für die Nullstellung. Dazu aktivieren wir den Button -Zero Drift-
Hinweis: bitte sonst keine Einstellungen im Webinface ändern!
Das war’s auch schon zur Kalibrierung des künstl. Horizonts. Jetzt steht ein richtig eingestellter Horizont im VFRnav zur Verfügung. Wir schließen das Browserfenster und landen wieder im VFRnav.
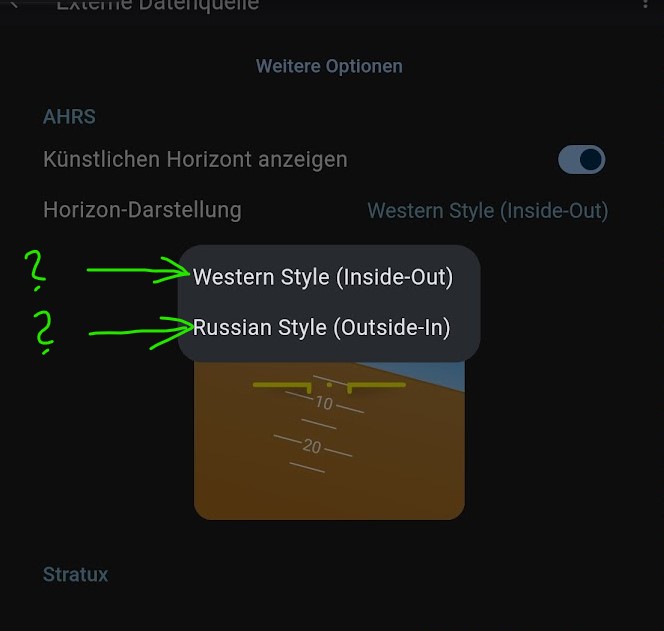
Völlig frei von jeglicher aktuell politischer Situation kann man sich für eine Funktionsweise des künstlichen Horizonts im VFRnav entscheiden. Entweder man möchte den klassischem westlichen Style verwenden, bei dem sich der Horizont (oder die Erdkugel) dreht und das Flugzeug stabil bleibt oder man möchte den russischen Style verwenden, bei dem es genau andersrum funktioniert. (sicher etwas für die alten MiG Piloten) Mir persönlich gefällt diese Form sogar besser.
Nun können wir uns über einen kostenlosen künstlichen Horizont im VFRnav sehr freuen ![]()
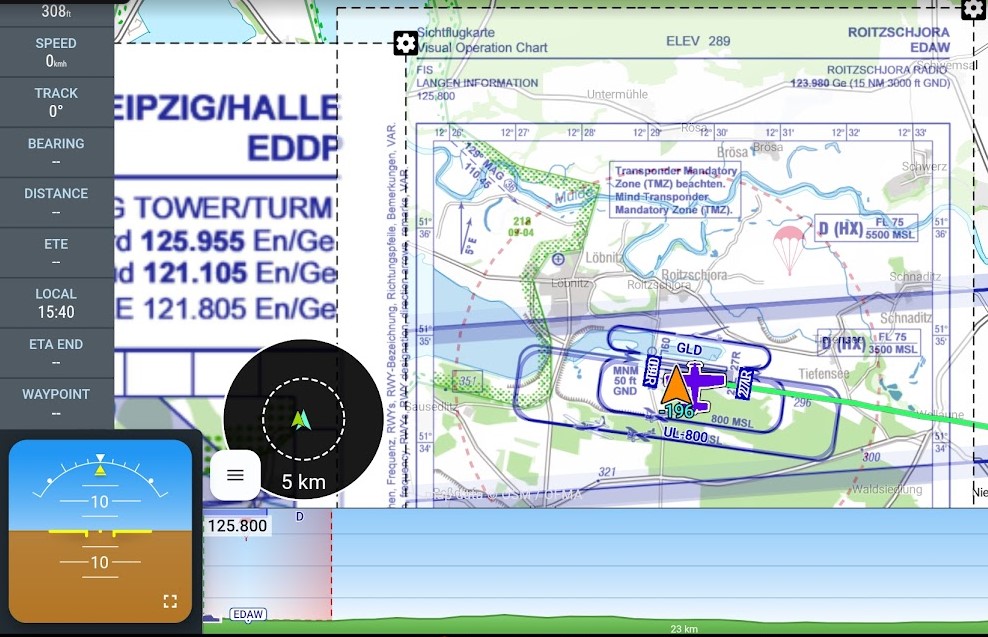
und durch erweitern (rechts unten) die Darstellungsform nach Wunsch ändern.

Handy Benutzer:
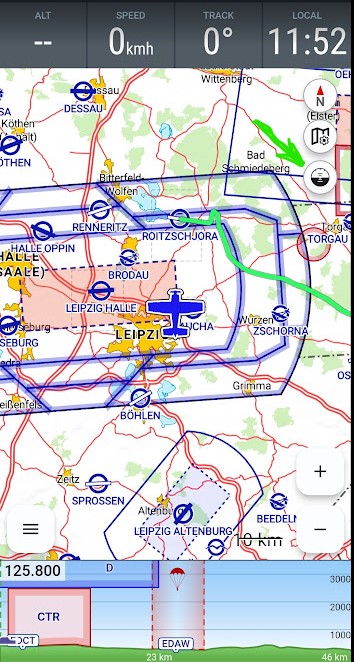
Handy Nutzer von VFRnav können den künstlichen Horizont über das Symbol auf der MovingMap (siehe grüner Pfeil) aktivieren.
Ich hoffe hiermit einiges zu dem Thema - Stratux & künstl. Horizont - verständlich erklärt zu haben. Bei Fragen, wie immer gern einen Kommentar.
simply Fly, Fliegergrüße,
Karsten