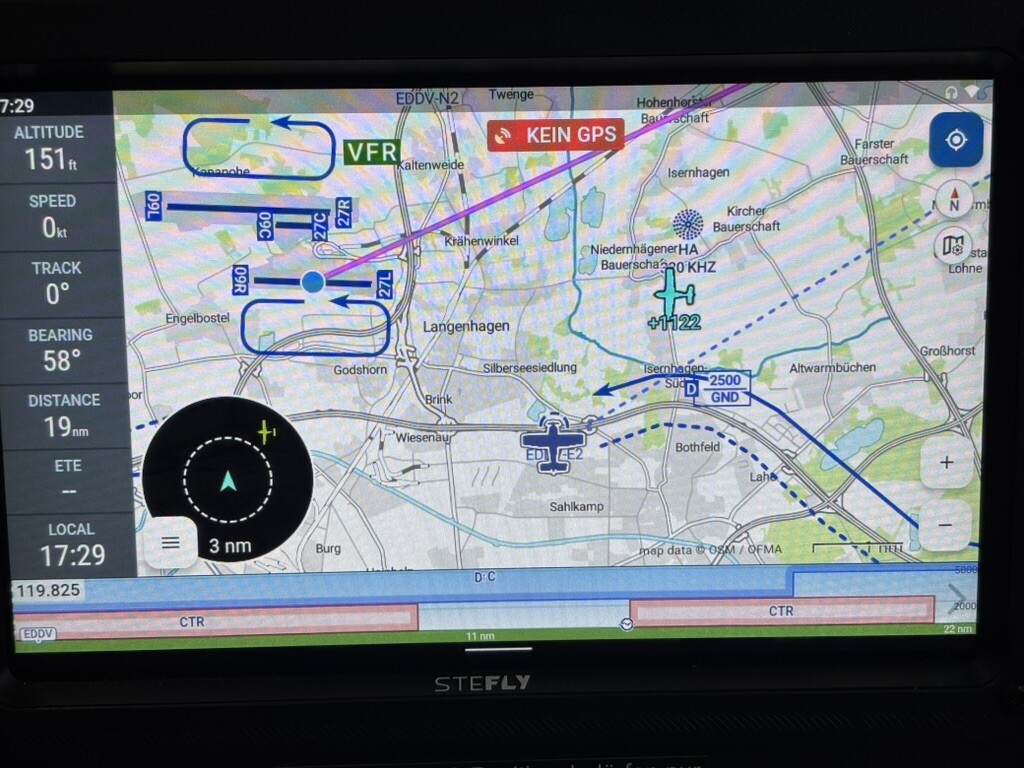
wir haben nun ein SteFly Nav 70 in unseren Motorsegler eingebaut und möchten darauf gerne VFRnav nutzen. Das Gerät hat kein eingebautes GPS. Der Standort kommt zusammen mit den Verkehrsdaten vom Flarm.
Sowohl Position als auch Verkehr werden zuverlässig angezeigt. Trotzdem erscheint der Hinweis “KEIN GPS”.
Wenn der Standort + Standortgenauigkeit aktiviert sind, kommt beim Start die oben genannte Meldung.
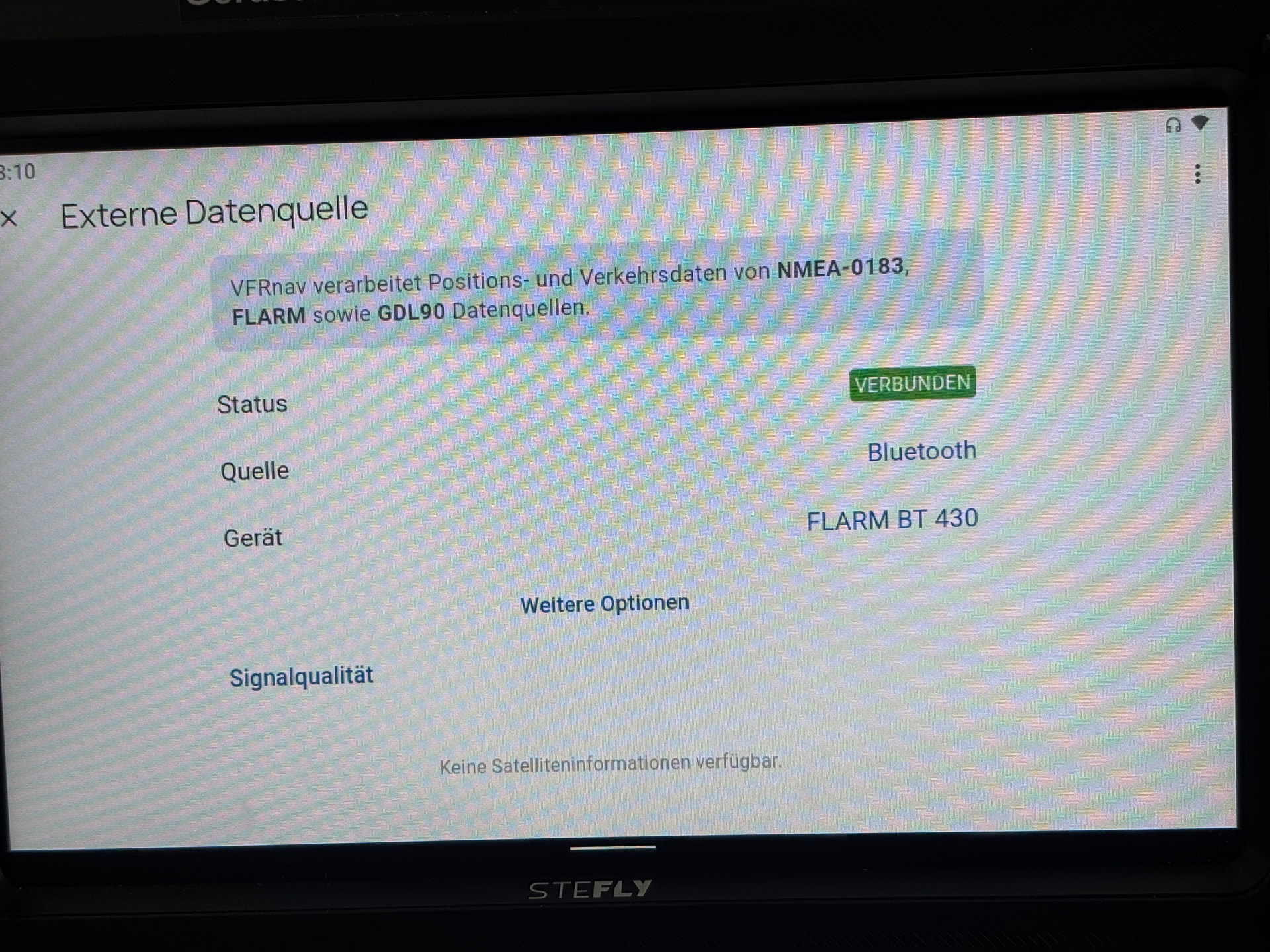
Unter Einstellung-Signalqualität steht dauerhaft „Warte auf GPS“. Ich vermute, die komplette Stabdort-Logik bezieht sich im Programm immer auf den internen GPS Empfänger.
Wenn ich VFRnav die Berechtigung für Standort komplett entziehe, gibt es die Meldung am Start nicht mehr. In beiden Fällen steht oben in rot „KEIN GPS“, obwohl die korrekte Position des Flarm richtig in der Karte angezeigt wird.
Wir haben gerade eine PowerMouse+ verbaut. Die ist aktuell per BT gekoppelt.
…dies deutet darauf hin, daß eben keine korrekten GPS Daten vom Flarm? ( fragte oben schon welches?) übertragen werden, oder diese wahrscheinlich nicht korrekt verarbeitet werden.
Nein! →GPS Daten werden bisher absolut korrekt
1. via BT
2. via WLAN
z.B vom Stratux /T-Beam oder auch vom Power Flarm übertragen! Powerflarm habe ich bei einem Fliegerkollegen im VFRnav überprüft.
Die Meldung bzgl. Standortgenauigkeit kommt eben daher, daß
inter kein GPS vorhanden ist
von externer Quelle vermutlich keine, oder keine korrekten Daten einfließen
wie es nun zu Deiner Position korrekter Weise kommt??…
..und mit der BT Mouse kamen Sat.Anzeigen? ( Balken grün)
Das Gerät hat doch sicher einen USB Anschluss?
Falls eine USB GPS Mouse zu Hand ist, kannst Du diese mal anstecken? …empfehlenswert sind UBLOX Chipsätze ab Vers.6 mindestens, 8 super, 10 bestens!
Hinweis ( ggf. wissenswert)
Bei einer klassischen Installation wird bei Ausfall eines externen GPS automatisch auf internes GPS (wo VFRnav drauf läuft Handy, Tablett) umgeschaltet. Deswegen muss bei dieser Installation der Standort im Android aktiviert sein.
Hi,
VFRnav erwartet aktuell immer einen internen Empfänger, der im Falle des Ausfalles des externen als Backup einspringt und automatisch aktiviert wird, wenn nach ein paar Sekunden keine gültigen Positionsdaten kommen.
Ich werde dies entsprechend versuchen auf meinen Geräten nachzustellen, in wie weit wir erkennen können, wenn es überhaupt keinen internen Empfänger gibt
Ok, ich glaube hier liegt ein Missverständnis vor. Die PowerMouse+ ist das Flarm.
Klingt nach einem sehr sinnvollen Feature, wenn internes GPS vorhanden ist! Es wäre natürlich trotzdem super, wenn Geräte ohne internes GPS unterstützt würden, z.B. das SteFly oder ein iPad.
Eine tolles Upgrade wäre, wenn man eine Liste von Geräten erstellen könnte, die von oben nach unten priorisiert werden, z.B.
Air Control Display (Baro, Funk, Transponder)
Flarm (GPS, Baro, Verkehr)
interne Sensoren (GPS, Baro)
In diesem Beispiel würde Baro vom ACD kommen und GPS+Verkehr vom Flarm. Wenn eins oder beides ausfällt, wird auf die internen Sensoren zurückgegriffen.
Danke! Ich habe deinen Vorschlag auf der ToDo Liste notiert. Das unterscheidet sich sehr von der aktuellen Umsetzung, ergibt in bestimmten Setups aber sicherlich Sinn.