we have now installed a SteFly Nav 70 in our motor glider and would like to use VFRnav on it. The device has no built-in GPS. The location is provided together with the traffic data from the Flarm.
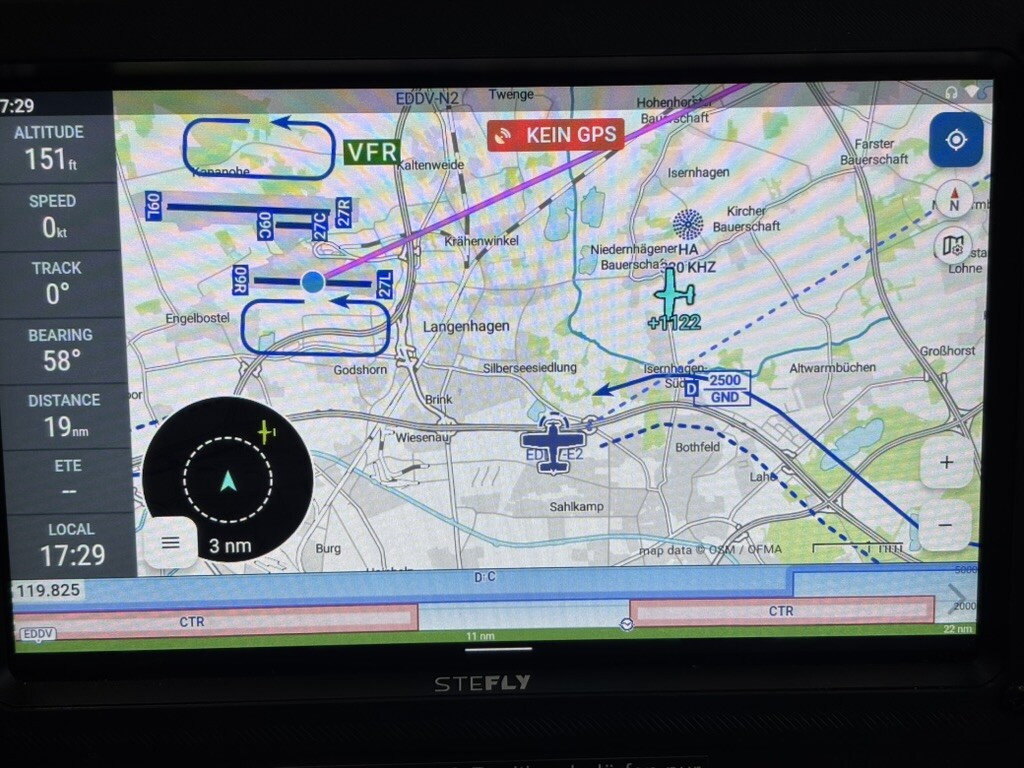
Both position and traffic are displayed reliably. Nevertheless the message “NO GPS” appears.
When Location + Location accuracy are enabled, the message mentioned above appears at startup.
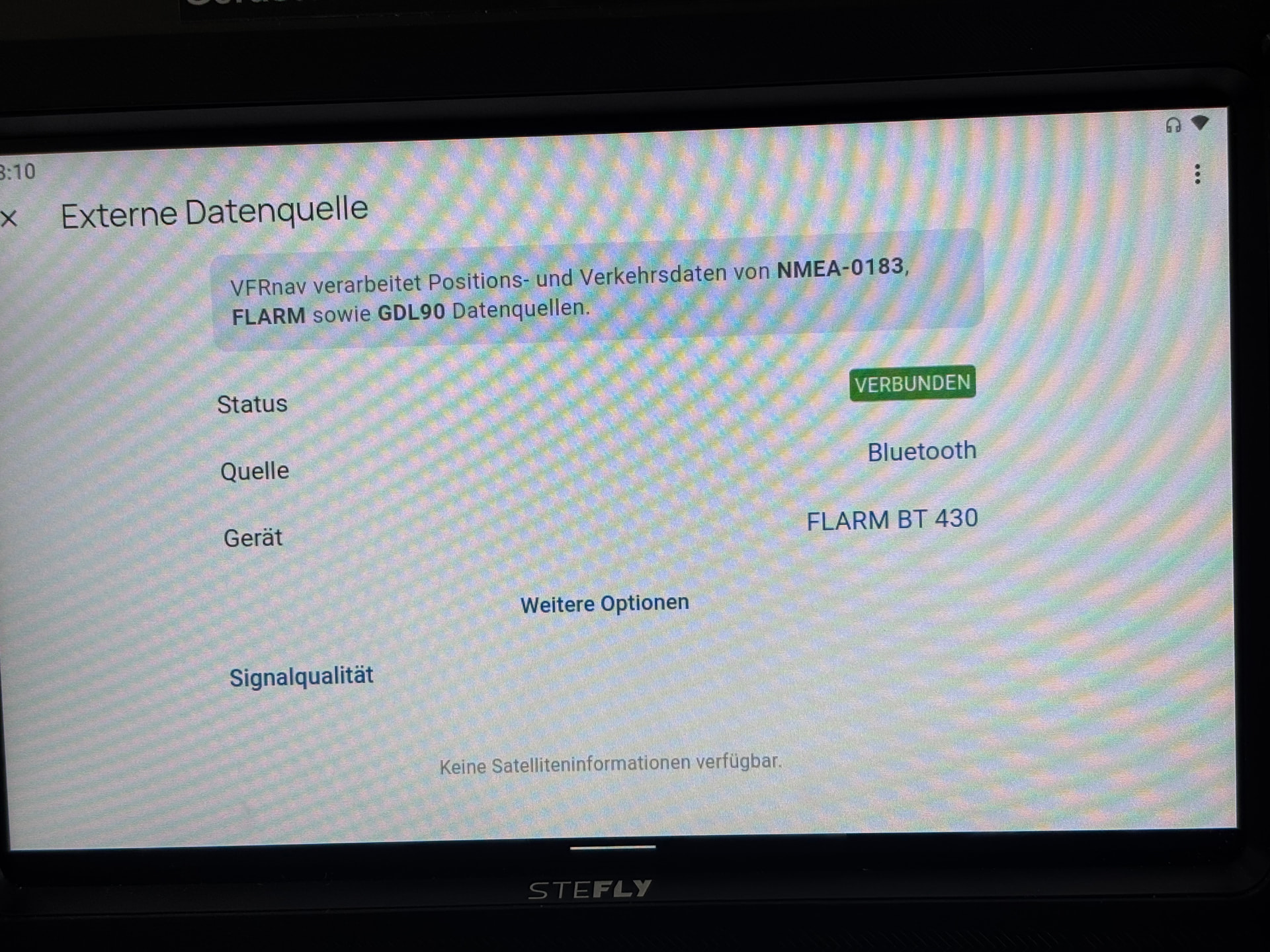
Under Settings - Signal Quality it permanently says “Waiting for GPS”. I suspect the entire location logic in the program always refers to the internal GPS receiver.
If I completely revoke VFRnav’s permission for Location, the startup message no longer appears. In both cases it says “NO GPS” in red at the top, although the correct position from the Flarm is displayed correctly on the map.
We have just installed a PowerMouse+. It is currently paired via BT (Bluetooth).
…this suggests that no correct GPS data are being transmitted from the Flarm? (already asked above which one?) or that these are probably not being processed correctly.
No! → GPS data have been absolutely correct so far 1. via Bluetooth
via Wi‑Fi
e.g. transmitted from the Stratux or also from the Power Flarm! ..also from the Power Flarm!
Unfortunately I don’t know this device.
..and with the Bluetooth mouse satellite indicators appeared? (green)
Hi,
VFRnav currently always expects an internal receiver that, in the event of a failure of the external one, steps in as a backup and is activated automatically if no valid position data arrive after a few seconds.
I will try to reproduce this on my devices to see to what extent we can detect if there is no internal receiver at all
Ok, I think there’s a misunderstanding here. The PowerMouse+ is the Flarm.
Sounds like a very sensible feature if internal GPS is available! It would of course still be great if devices without internal GPS were supported, e.g. the SteFly or an iPad.
A great upgrade would be if you could create a list of devices prioritized from top to bottom, e.g.
Air Control Display (Baro, radio, Transponder)
Flarm (GPS, Baro, traffic)
internal sensors (GPS, Baro)
In this example, Baro would come from the ACD and GPS+traffic from the Flarm. If one or both fail, the internal sensors are used as a fallback.
Thanks! I’ve noted your suggestion on the ToDo list. That is very different from the current implementation, but certainly makes sense in certain setups.