man kann Flarm und Funkgerät bereits per Bluetooth Schnittstelle mit VFRnav verbinden. Einige Geräte unterstützen zusätzlich serielle RS232 Schnittstellen, z.B. das SteFly Nav.
Über diese Schnittstellen ist es möglich, z.B. Verkehrsdaten direkt per Kabel von einem Flarm als NMEA Daten zu empfangen und das Funkgerät direkt ohne Bluetooth Adapter zu steuern.
Aktuell sind in VFRnav als Schnitstelle nur Bluetooth und Netzwerk auswahlbar. Es wäre ein tolles Upgrade, wenn auch die seriellen Schnittstellen nutzbar wären.
Ich hatte bereits im letzten Jahr Kontakt zu SteFly bezüglich einer möglichen Integration der Hardwareunterstützung in VFRnav. Grundsätzlich wären wir dazu gerne bereit. Dafür benötigen wir jedoch einige weitere technische Informationen, da sich die seriellen Schnittstellen nicht über die üblichen Android-Geräte (Smartphone/Tablet) simulieren lassen.
Uns wurde damals auch ein Demogerät angeboten, danach gab es allerdings keinen weiteren Kontakt und auch kein zugesendetes Gerät.
Wenn du möchtest, kannst du gerne einmal beim Hersteller nach entsprechender Unterstützung fragen. Ohne passende Hardware ist eine Umsetzung von unserer Seite leider nicht möglich.
Genau, wir hatten letztes Jahr E-Mail Kontakt zu dem Thema. Ich freue mich sehr, dass viele Inhalte seit dem umgesetzt werden konnten, z.B. Steuerung von Funkgeräten.
Ich frage nochmal bei Stefan bezüglich eines Demo Geräts nach.
Ah siehste! Dann warst du das
Ich erinnere mich.
Wie gesagt - von uns aus gerne. Aber ohne weitere Infos fischen wir im Trüben und da ergibt ein Implementierungsversuch wenig Sinn.
LG Herman
ich konnte das Update um März erfolgreich testen. Soweit ich mich erinnere, hat die serielle Schnittstelle zu dem Zeitpunkt auch problemlos funktioniert.
Nun ist der Motorsegler aus der Wartung und wir fliegen mit dem Stefly und VFRnav.
Leider gibt es noch irgendein Problem beim Herstellen der Verbindung:
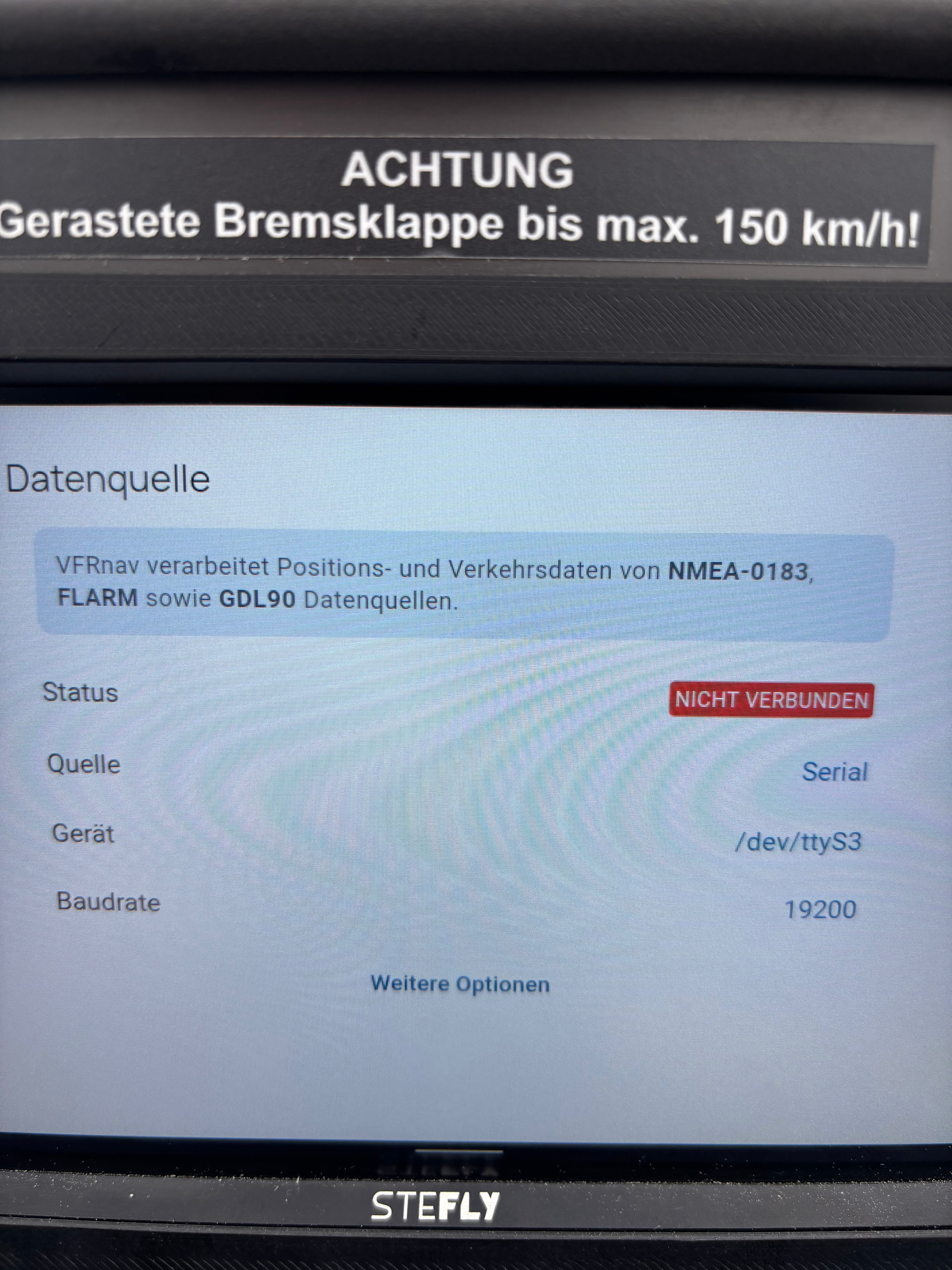
Wenn ich das Gerät und VFRnav direkt starte, klappt die serielle Verbindung VFRnav - PowerMouse nicht. In den Einstellungen wird zwar “Verbunden” angezeigt, trotzdem kommt die Meldung “kein GPS”.
Es gibt einen zuverlässigen Work-Arround:
XCSoar zuerst starten (serielle Verbindung wird automatisch hergestellt und funktioniert sofot)
XCSoar wieder beenden
VFRnav starten
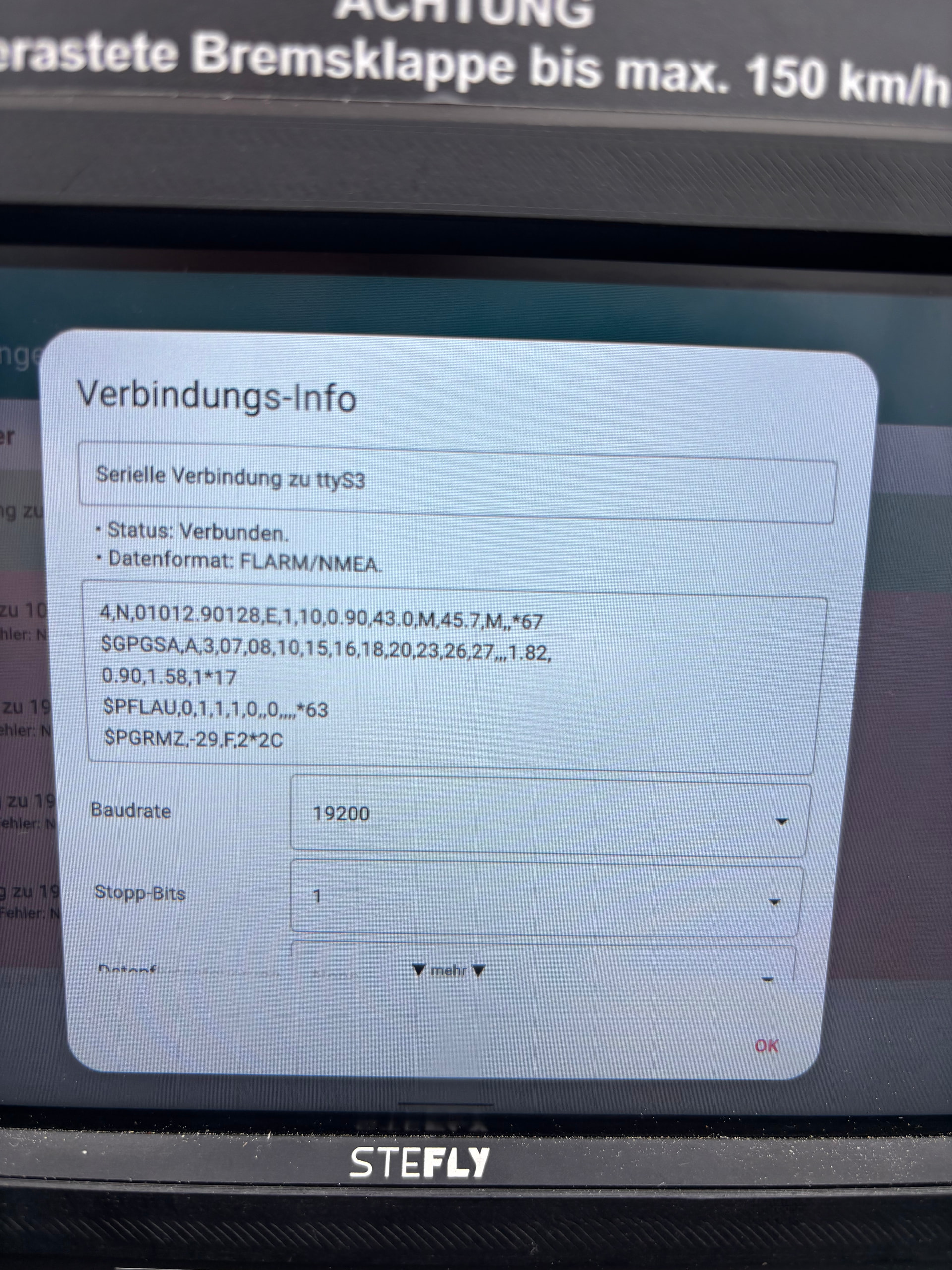
Nun funktioniert die serielle Verbindung zuverlässig.
Scheinbar wird die Verbindung von XCSoar irgendwie initialisiert, zurückgesetzt oder ähnliches. Diese Funktion fehlt scheinbar in VFRnav.
Wirklich merkwürdiges Verhalten… 100% verstehen tue ich es leider nicht. Vielleicht kannst du helfen?
an der seriellen Schnittstelle selbst haben wir keine Änderungen vorgenommen. Mit meinem Testgerät funktionierte die Verbindung damals problemlos.
Ich habe allerdings eine Vermutung:
Welche Baudrate ist in den XCSoar-Anschlusseinstellungen eingestellt?
VFRnav verwendet aktuell die Standard-Systemeinstellungen für die Baudrate. Wenn das angeschlossene Gerät davon abweicht, funktioniert die Verbindung nicht korrekt.
Wenn nun ein anderer Dienst – wie bei dir XCSoar – die Baudrate verändert, bleibt dieser Wert bis zum nächsten Systemneustart als neuer Standardwert aktiv.
Lange Rede, kurzer Sinn:
Das kommende Update wird eine Einstellung enthalten, mit der die Baudrate direkt innerhalb von VFRnav festgelegt werden kann. Ich würde dich bitten, die serielle Verbindung danach noch einmal zu testen.
ich konnte die neue Software nach dem Update nun testen.
Leider kommt keine Verbindung zustanden und auch der Work-Arround funktioniert nicht mehr. Das sind meiner Meinung nach aber gute Nachrichten, weil das darauf hinweist, dass du an der richtigen Stelle dran warst
Mit XCSoar oder Enroute funktioniert die Verbindung problemlos.
das “Nicht Verbunden” deutet darauf hin, dass der Port bereits belegt ist. Bei der seriellen Verbindung gilt, dass keine zwei Prozesse gleichzeitig drauf zugreifen können. Prüfe bitte, ob wirklich alle anderen Apps, die Zugriff auf die serielle Verbindung haben, komplett beendet sind und auch nicht im Hintergrund noch weiterlaufen.
Mit der heutigen 4.27 wurde die serielle Verbindung noch etwas “gehärtet”. Dazu ist mir auch gelungen, ein Testsetup dafür aufzubauen. Das macht das Debugging erheblich einfacher