Il est déjà possible de connecter Flarm et le poste radio à VFRnav via une interface Bluetooth. Certains appareils prennent en charge en plus des interfaces série RS232, par ex. le SteFly Nav.
Via ces interfaces, il est possible, par ex., de recevoir directement par câble des données de trafic d’un Flarm au format NMEA et de piloter la radio directement sans adaptateur Bluetooth.
Actuellement, dans VFRnav, seules l’interface Bluetooth et le réseau sont sélectionnables. Ce serait une excellente mise à niveau si les interfaces série pouvaient également être utilisées.
L’année dernière, j’ai déjà été en contact avec SteFly concernant une possible intégration de la prise en charge matérielle dans VFRnav. En principe, nous serions disposés à le faire. Pour cela, nous avons toutefois besoin de quelques informations techniques supplémentaires, car les interfaces série ne peuvent pas être simulées sur les appareils Android habituels (smartphone/tablette).
On nous avait également proposé à l’époque un appareil de démonstration, mais il n’y a ensuite eu aucun contact supplémentaire et aucun appareil envoyé.
Si tu veux, tu peux volontiers demander au fabricant s’il peut fournir l’assistance correspondante. Sans matériel approprié, une mise en œuvre de notre part n’est malheureusement pas possible.
En effet, nous avons eu l’année dernière des échanges par e-mail à ce sujet. Je suis très heureux que de nombreux éléments aient pu être mis en œuvre depuis, par ex. la commande des radios.
Je demande à nouveau à Stefan au sujet d’un appareil de démonstration.
Ah, tu vois ! Alors c’était toi
Je m’en souviens.
Comme je l’ai dit - de notre côté, volontiers. Mais sans informations supplémentaires nous pêchons dans le flou et une tentative d’implémentation n’a guère de sens.
Amicalement, Herman
J’ai pu tester la mise à jour de mars avec succès. Autant que je me souvienne, l’interface série fonctionnait aussi correctement à ce moment-là.
Le motoplaneur est maintenant sorti de la maintenance et nous volons avec le Stefly et VFRnav.
Malheureusement, il y a encore un problème lors de l’établissement de la connexion :
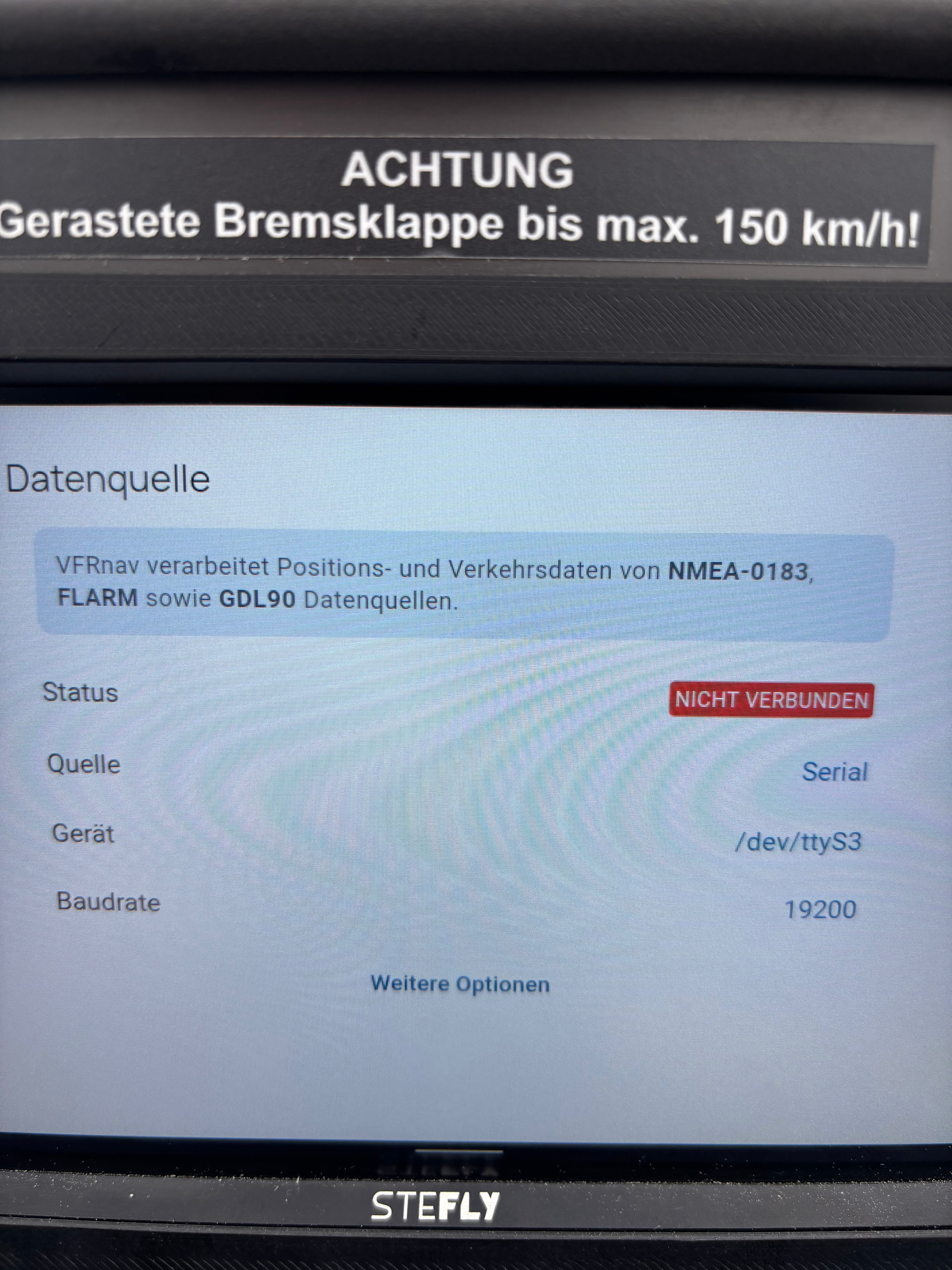
Lorsque je démarre directement l’appareil et VFRnav, la connexion série VFRnav - PowerMouse ne fonctionne pas. Dans les paramètres, il est affiché “Connecté”, mais le message “pas de GPS” apparaît quand même.
Il existe une solution de contournement fiable :
Démarrer d’abord XCSoar (la connexion série est établie automatiquement et fonctionne immédiatement)
Fermer XCSoar
Démarrer VFRnav
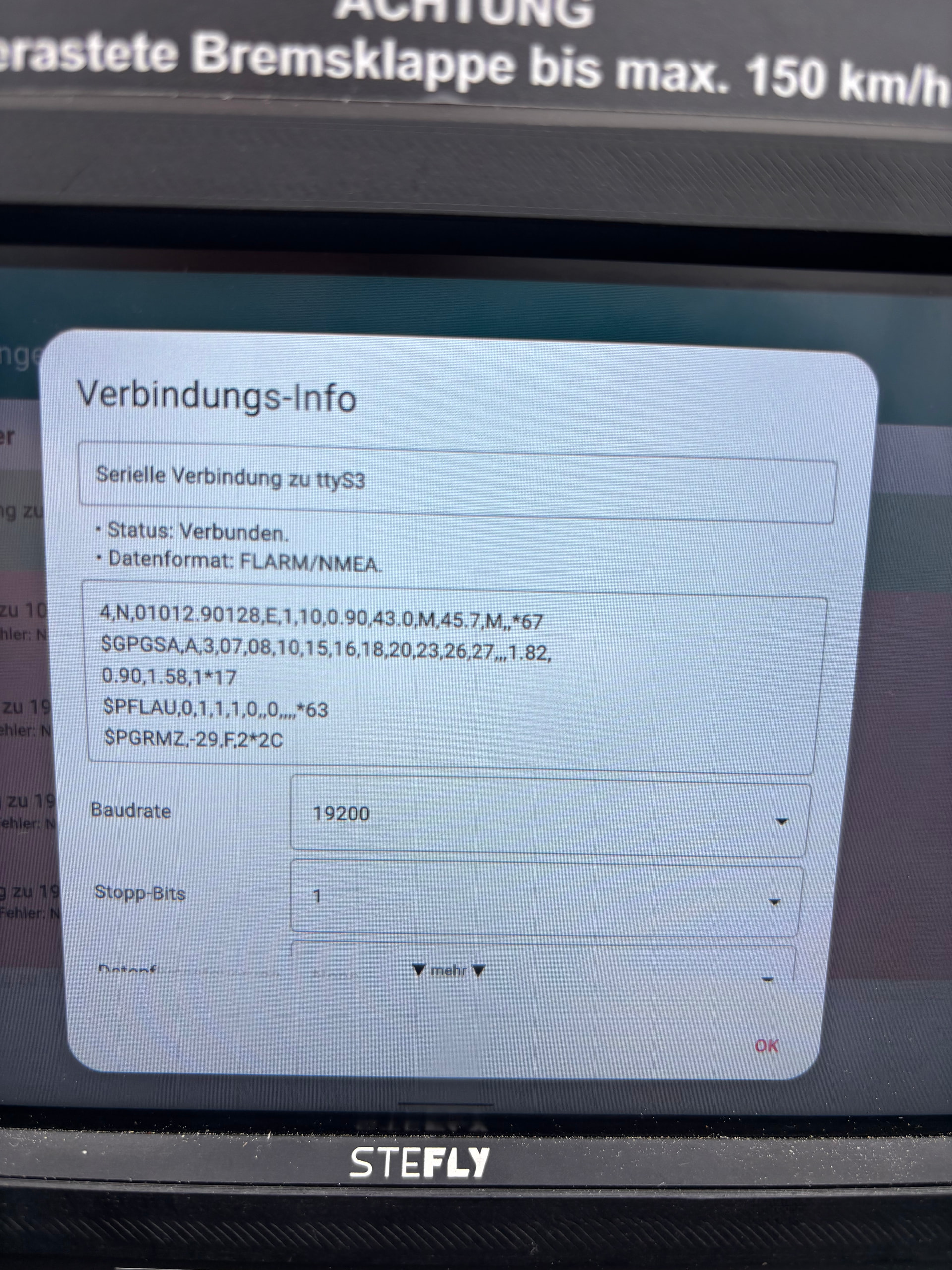
La connexion série fonctionne désormais de manière fiable.
Il semble que XCSoar initialise ou réinitialise la connexion d’une manière ou d’une autre. Cette fonctionnalité manque apparemment dans VFRnav.
Vraiment un comportement étrange… Je ne le comprends malheureusement pas à 100 %. Peut-être peux-tu m’aider ?
Nous n’avons apporté aucune modification à l’interface série elle-même. Avec mon appareil de test, la connexion fonctionnait sans problème à l’époque.
J’ai toutefois une hypothèse :
Quelle vitesse en bauds est configurée dans les paramètres de connexion de XCSoar ?
VFRnav utilise actuellement les paramètres système par défaut pour la vitesse en bauds. Si l’appareil connecté diffère, la connexion ne fonctionne pas correctement.
Si un autre service — comme XCSoar dans ton cas — modifie la vitesse en bauds, cette valeur reste active comme nouvelle valeur par défaut jusqu’au prochain redémarrage du système.
Bref :
La prochaine mise à jour inclura un réglage permettant de définir la vitesse en bauds directement dans VFRnav. Je te demanderais de tester à nouveau la connexion série ensuite.
Ton hypothèse semble tout à fait plausible ; je vais bien sûr tester ça avec plaisir ! Merci beaucoup pour l’option de configuration prévue dans la prochaine mise à jour !
j’ai pu tester le nouveau logiciel après la mise à jour.
Malheureusement, aucune connexion ne s’établit et la solution de contournement ne fonctionne plus non plus. À mon avis, c’est néanmoins une bonne nouvelle, car cela indique que tu étais sur la bonne piste
Avec XCSoar ou Enroute la connexion fonctionne sans problème.
Le message « Non connecté » indique que le port est déjà occupé. Pour une connexion série, deux processus ne peuvent pas y accéder en même temps. Vérifie s’il te plaît que toutes les autres applications ayant accès à la connexion série sont bien complètement fermées et ne tournent pas en arrière-plan.
Avec la version 4.27 d’aujourd’hui, la connexion série a été un peu « renforcée ». J’ai d’ailleurs réussi à monter une configuration de test pour ça. Cela rend le débogage considérablement plus simple